TC Plate Changer
Installazione di un finecorsa meccanico per il blocco
dello stage MICOS
durante il carico/scarico
Il firmware v.4 migliora la sincronizzazione fra il software di scanning e quello della PLC.
Tuttavia, e' utile aggiungere un livello di sicurezza hardware per impedire la movimentazione dello stage durante le operazioni di carico e scarico.
Il blocco avviene lungo la corsa dell'asse motorizzato del robot un finecorsa meccanico che disabilita l'alimentazione dei motori dello stage MICOS quando il robot si trova in prossimta' del microscopio.
Il finecorsa meccanico viene montato sul supporto giŕ fornito (Fig. 1) e fissato al carrello tramite due viti a brugola (Fig. 2). Il rullo presente sull'asta metallica che aziona il contatto deve stare a sinistra.


Fig. 1: Supporto del finecorsa. Fig. 2: montaggio switch sul robot.
Le due viti a brugola attualmente montate vanno sostituite con due di lunghezza superiore.
Per attivare il finecorsa e' necessario fissare con nastro biadesivo uno spessore di plastica sull'asse del robot (Fig. 3); in questo modo il contatto viene chiuso quando il carrello arriva a circa 20 cm dallo stage. Lo spessore puo' essere fornito da Bologna.
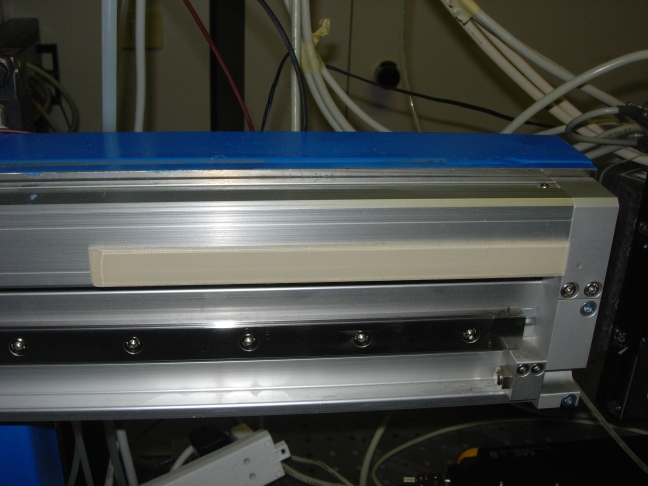
Fig. 3: Spessore di plastica utilizzato per attivare lo switch fine-corsa.
L'interruttore fine corsa a ha tre contatti: quelli che interressano a noi sono il centrale e quello di destra, come si vede dalla foto in Fig. 4.


Fig. 4: Cablaggio del finecorsa. Fig. 5: Connettore Interlock sul MICOS Power Drive.
I due contatti vanno cablati ai contatti 1 e 9 del connettore Cannon a 15pin denominato Interlock presente sull'unitŕ MICOS Power Drive (Fig. 5).
back